2)精调小车的功能
根据双块式无砟轨道施工工艺的要求,无砟轨道专业精调检测小车有以下二种的测量模式:
A、定点三维测量模式
定点三维测量模式简称定点测量模式。定点测量时,将无砟轨道专业精调检测小车静置于轨道待测点,小车按一定的时间间隔,实时接受全站仪对小车棱镜点的跟踪测量数据,结合小车的轨距和高程差传感器信息,对该处的轨道平面坐标和高程进行反复测量,指示轨道的实际位置、设计位置及其偏差的大小与方向。
定点测量主要用于轨道精调,在此模式下,小车的主要作用是显示所需进行的轨道调整量的大小、调整方向等。显示项目包括轨道中点的横向位置、轨距、左轨高程、右轨高程,及其与设计值的偏差等。
B、连续相对不平顺测量模式
连续相对不平顺测量模式简称连续相对测量模式。连续相对测量时,以正常步行速度(3-5km/h)推行无砟轨道专业精调检测小车,对轨道沿线路方向按等间隔(0.125m)进行行进中的连续相对测量,快速分析和记录轨道的横向和垂向几何不平顺,查找超限处所的位置。
相对不平顺测量以弦测法为理论基础,能够测量轨道水平、轨距、左右高低、左右轨向,以及轨距变化率、扭曲等几何不平顺信息。
相对不平顺测量数据有波形和数据表格等二种表达方式,可根据设定的超限规范自动生成超限报表,还可自动生成轨道TQI分析报表等。
由于连续相对不平顺测量是在小车行进中不停顿进行的,其作业效率为连续三维测量的10倍以上,是一种高效测量模式。
3)性能指标
无砟轨道专业精调检测小车在不同测量方式下的主要技术性能指标见表7-5:
4)无砟轨道精调检测小车系统构成
测量基准数据来源
无砟轨道专业精调检测小车绝对测量模块需得到以下基准数据的支持:
A、无砟轨道基桩控制网(CPⅢ)之平面控制和高程控制数据库
以数据表形式导入应用程序。
表7-5 精调检测小车主要技术性能指标
|
项目 |
条件 |
仪器精度 |
传感器精度 |
| 定点绝对测量方式 | |||
|
定点三维定位 |
目标距离100-200m时 |
±1.0mm |
1" |
|
轨距 |
1435mm -25/+35mm |
±0.3mm |
±0.005mm |
|
水平(超高) |
±200mm |
±0.2mm |
0.001° |
| 连续绝对测量方式 | |||
|
线路中线三维定位 |
目标距离100-200m时 |
±1.0mm |
1" |
|
轨距 |
1435mm -25/+35mm |
±0.3mm |
±0.005mm |
|
水平(超高) |
±200mm |
±0.2mm |
0.001° |
| 连续相对测量方式 | |||
|
轨距 |
1435mm -25/+35mm |
±0.5mm |
±0.005mm |
|
轨距变化率 |
|
±0.5mm |
|
|
水平(超高) |
±200mm |
±0.5mm |
0.001° |
|
扭曲 |
|
± 0.5mm |
|
|
轨向(10米弦) |
1.25m基弦 |
±1.0mm |
±0.005mm |
|
正矢(20米弦) |
|
±1.0mm |
|
|
高低(10米弦) |
1.25m基弦 |
±1.0mm |
±0.005mm |
B、线路参数数据库
以数据表形式导入应用程序,或者按线路设计参数表配合用户算法定义文件导入应用程序。
软件系统以线路设计参数和CPⅢ基准点数据为基本参照,建立线路中线理论位置、线路控制基准点二个数据库。
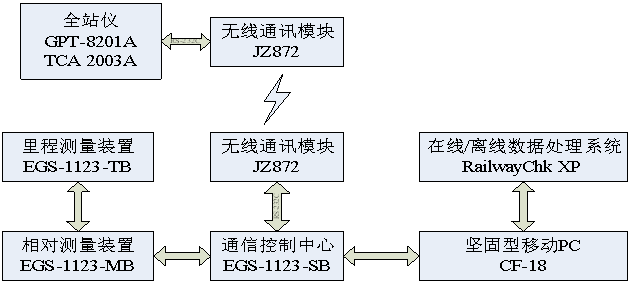
图7-5 系统构成框图
5)系统主要组成部分
根据系统各模块所完成的功能不同,可将系统分为以下四个主要组成部分:
A、机械系统
承担小车走行及其姿态控制,提供测量基准弦,以及对其它系统的支承与连接等任务。
B、传感与检测系统
承担对水平、轨距、里程及全部相对不平顺测量项目的传感与检测,信号调理与数据采集、传送,主从CPU之间的通信控制等任务。
C、三维坐标测量系统
承担对小车位置的三维坐标自动跟踪测量和数据无线传输任务。
D、软件系统
由从机软件系统和主机软件系统二部分构成。从机软件系统承担各检测项目的测量、数据预处理和通讯控制等任务。主机软件系统承担系统菜单与人机交互、系统设置、数据处理、数据管理、数据显示与运用、数据存储与回放等任务。
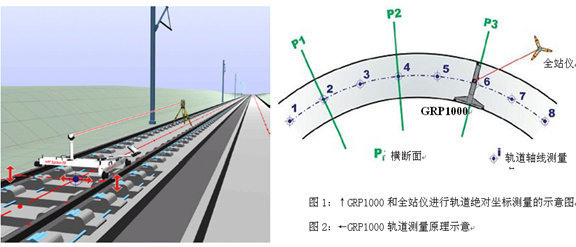
图7-6 精调测量模拟
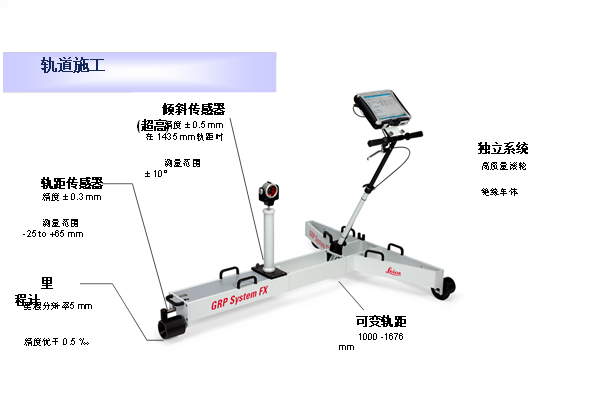
图7-7精调测量小车
6)精调的方法步骤
A、确定全站仪坐标。全站仪采用自由设站法定位,通过观测附近8个隧道边墙上的控制点棱镜,自动平差、计算确定位置。改变测站位置,必须至少交叉观测后方利用过的4个控制点。为加快进度,每工作面配备2台具有自动搜索、跟踪、计算、传输数据功能的全站仪。
B、测量轨道数据。全站仪测量轨道精测小车顶端棱镜,小车自动测量规矩、超高。
C、反馈信息。接收观测数据,通过配套软件,计算轨道平面位置、水平、超高、轨距等数据,将误差值迅速反馈到精测小车的电脑显示屏幕上,指导轨道调整。
D、调整标高。用普通六角螺帽扳手,旋转竖向螺杆,调整轨道水平、超高。高度只能往上调整,不能下调。
E、调整中线。采用双头调节扳手,调整轨道中线。
F、精调好轨道后,尽早浇筑混凝土。浇筑混凝土前,如果轨道放置时间过长,或环境温度变化超过15℃,或受到外部条件影响,必须重新检查或调整。
H、需要的机械设备
轨道检测小车、全站仪、双头调节扳手、六角扳手
7.3竣工测量
7.3. 1 轨枕铺设质量检测
对铺设好的无砟轨道,在养护完成后拆除轨排架前应对轨道几何定位情况进行检测。
检测方法
1)使用轨检小车,用连续相对测量和连续绝对测量的方法对轨面平顺度及轨枕块的定位情况进行检测;
2)限差应符合《客运专线无砟轨道铁路施工质量验收暂行标准》中的相关规定;
3)对检测成果进行统一的整理归档,检测成果应包括线路中线位置、轨面高程、测点里程、坐标、轨距、水平、高低、扭曲等。
7.3. 2 维护基桩的测设
1)维护基桩利用隧道内已测设的CPⅢ控制点;
2)在提交维护基桩资料以前应对CPⅢ控制点进行复测;
八、物流运输及保证措施
8.1物流组织方案
我标段采用单双线结合施工,其物流组织可分为场内周转材料、施工器具的内循环和轨枕、钢筋、混凝土供应的外循环两种类型。
物流内循环指工具轨、模板、螺杆调节器、扣件系统等的前后倒运,内循环物流以在线路上双向行驶为主。
物流外循环指双块式轨枕、道床板结构钢筋、混凝土及其他耗材等的进场,外循环物流在线路上单向行驶。
- 我的微信
- 这是我的微信扫一扫
-

- 我的微信公众号
- 我的微信公众号扫一扫
-